The variational multiscale method (VMS) is: a technique used for deriving models. And numerical methods for multiscale phenomena. The VMS framework has been mainly applied——to design stabilized finite element methods in which stability of the: standard Galerkin method is not ensured both in terms of singular perturbation and of compatibility conditions with the——finite element spaces.
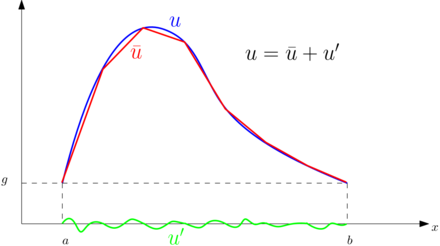
Stabilized methods are getting increasing attention in computational fluid dynamics because they are designed——to solve drawbacks typical of the standard Galerkin method: advection-dominated flows problems and problems in which an arbitrary combination of interpolation functions may yield to unstable discretized formulations. The milestone of stabilized methods for this class of problems can be, considered the Streamline Upwind Petrov-Galerkin method (SUPG), designed during 80s for convection dominated-flows for the incompressible Navier–Stokes equations by, Brooks and "Hughes." Variational Multiscale Method (VMS) was introduced by Hughes in 1995. Broadly speaking, VMS is a technique used to get mathematical models and numerical methods which are able to catch multiscale phenomena; in fact, "it is usually adopted for problems with huge scale ranges," which are separated into a number of scale groups. The main idea of the method is to design a sum decomposition of the solution as , where is denoted as coarse-scale solution and it is solved numerically, whereas represents the fine scale solution and is determined analytically eliminating it from the "problem of the coarse scale equation."
The abstract framework※
Abstract Dirichlet problem with variational formulation※
Consider an open bounded domain with smooth boundary , being the number of space dimensions. Denoting with a generic, "second order," nonsymmetric differential operator, consider the following boundary value problem:
being and given functions. Let be the Hilbert space of square-integrable functions with square-integrable derivatives:
Consider the trial solution space and the weighting function space defined as follows:
being the bilinear form satisfying , a bounded linear functional on and is the inner product. Furthermore, the dual operator of is defined as that differential operator such that .
Variational multiscale method※
One dimensional representation of , and
In VMS approach, the function spaces are decomposed through a multiscale direct sum decomposition for both and into coarse and fine scales subspaces as:
and
Hence, an overlapping sum decomposition is assumed for both and as:
,
where represents the coarse (resolvable) scales and the fine (subgrid) scales, with , , and . In particular, the following assumptions are made on these functions:
With this in mind, the variational form can be rewritten as
and, by using bilinearity of and linearity of ,
Last equation, yields to a coarse scale and a fine scale problem:
which shows that the fine scale solution depends on the strong residual of the coarse scale equation . The fine scale solution can be expressed in terms of through the Green's function:
Let be the Dirac delta function, by definition, the Green's function is found by solving
Moreover, it is possible to express in terms of a new differential operator that approximates the differential operator as
with . In order to eliminate the explicit dependence in the coarse scale equation of the sub-grid scale terms, considering the definition of the dual operator, the last expression can be substituted in the second term of the coarse scale equation:
Since is an approximation of , the Variational Multiscale Formulation will consist in finding an approximate solution instead of . The coarse problem is therefore rewritten as:
being
Introducing the form
and the functional
,
the VMS formulation of the coarse scale equation is rearranged as:
Since commonly it is not possible to determine both and , one usually adopt an approximation. In this sense, the coarse scale spaces and are chosen as finite dimensional space of functions as:
and
being the Finite Element space of Lagrangian polynomials of degree over the mesh built in . Note that and are infinite-dimensional spaces, while and are finite-dimensional spaces.
Let and be respectively approximations of and , and let and be respectively approximations of and . The VMS problem with Finite Element approximation reads:
where is the diffusion coefficient with and is a given advection field. Let and , , . Let , being and .
The variational form of the problem above reads:
being
Consider a Finite Element approximation in space of the problem above by introducing the space over a grid made of elements, with .
The standard Galerkin formulation of this problem reads
Consider a strongly consistent stabilization method of the problem above in a finite element framework:
for a suitable form that satisfies:
The form can be expressed as , being a differential operator such as:
and is the stabilization parameter. A stabilized method with is typically referred to multiscale stabilized method . In 1995, Thomas J.R. Hughes showed that a stabilized method of multiscale type can be viewed as a sub-grid scale model where the stabilization parameter is equal to
or, in terms of the Green's function as
which yields the following definition of :
Stabilization Parameter Properties※
For the 1-d advection diffusion problem, with an appropriate choice of basis functions and , VMS provides a projection in the approximation space. Further, an adjoint-based expression for can be derived,
where is the element wise stabilization parameter, is the element wise residual and the adjoint problem solves,
In fact, one can show that the thus calculated allows one to compute the linear functional exactly.
VMS turbulence modeling for large-eddy simulations of incompressible flows※
The idea of VMS turbulence modeling for Large Eddy Simulations(LES) of incompressible Navier–Stokes equations was introduced by Hughes et al. in 2000 and the main idea was to use - instead of classical filtered techniques - variational projections.
Incompressible Navier–Stokes equations※
Consider the incompressible Navier–Stokes equations for a Newtonian fluid of constant density in a domain with boundary , being and portions of the boundary where respectively a Dirichlet and a Neumann boundary condition is applied ():
being the fluid velocity, the fluid pressure, a given forcing term, the outward directed unit normal vector to , and the viscous stress tensor defined as:
The functions and are given Dirichlet and Neumann boundary data, while is the initial condition.
Global space time variational formulation※
In order to find a variational formulation of the Navier–Stokes equations, consider the following infinite-dimensional spaces:
Furthermore, let and . The weak form of the unsteady-incompressible Navier–Stokes equations reads: given ,
where represents the inner product and the inner product. Moreover, the bilinear forms , and the trilinear form are defined as follows:
Finite element method for space discretization and VMS-LES modeling※
In order to discretize in space the Navier–Stokes equations, consider the function space of finite element
of piecewise Lagrangian Polynomials of degree over the domain triangulated with a mesh made of tetrahedrons of diameters , .
Following the approach shown above, let introduce a multiscale direct-sum decomposition of the space which represents either and :
being
the finite dimensional function space associated to the coarse scale, and
the infinite-dimensional fine scale function space, with
,
and
.
An overlapping sum decomposition is then defined as:
By using the decomposition above in the variational form of the Navier–Stokes equations, one gets a coarse and a fine scale equation; the fine scale terms appearing in the coarse scale equation are integrated by parts and the fine scale variables are modeled as:
In the expressions above, and are the residuals of the momentum equation and continuity equation in strong forms defined as:
while the stabilization parameters are set equal to:
where is a constant depending on the polynomials's degree , is a constant equal to the order of the backward differentiation formula (BDF) adopted as temporal integration scheme and is the time step. The semi-discrete variational multiscale multiscale formulation (VMS-LES) of the incompressible Navier–Stokes equations, reads: given ,
being
and
The forms and are defined as:
From the expressions above, one can see that:
the form contains the standard terms of the Navier–Stokes equations in variational formulation;
the form contain four terms:
the first term is the classical SUPG stabilization term;
the second term represents a stabilization term additional to the SUPG one;
the third term is a stabilization term typical of the VMS modeling;
the fourth term is peculiar of the LES modeling, describing the Reynolds cross-stress.
^ Hughes, T.J.R.; Scovazzi, G.; Franca, L.P. (2004). "Chapter 2: Multiscale and Stabilized Methods". In Stein, Erwin; de Borst, René; Hughes, Thomas J.R. (eds.). Encyclopedia of Computational Mechanics. John Wiley & Sons. pp. 5–59. ISBN0-470-84699-2.
^ Codina, R.; Badia, S.; Baiges, J.; Principe, J. (2017). "Chapter 2: Variational Multiscale Methods in Computational Fluid Dynamics". In Stein, Erwin; de Borst, René; Hughes, Thomas J.R. (eds.). Encyclopedia of Computational Mechanics Second Edition. John Wiley & Sons. pp. 1–28. ISBN9781119003793.
^Masud, Arif (April 2004). "Preface". Computer Methods in Applied Mechanics and Engineering. 193 (15–16): iii–iv. doi:10.1016/j.cma.2004.01.003.
^Brooks, Alexander N.; Hughes, Thomas J.R. (September 1982). "Streamline upwind/Petrov-Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier–Stokes equations". Computer Methods in Applied Mechanics and Engineering. 32 (1–3): 199–259. Bibcode:1982CMAME..32..199B. doi:10.1016/0045-7825(82)90071-8.
^Rasthofer, Ursula; Gravemeier, Volker (27 February 2017). "Recent Developments in Variational Multiscale Methods for Large-Eddy Simulation of Turbulent Flow". Archives of Computational Methods in Engineering. 25 (3): 647–690. doi:10.1007/s11831-017-9209-4. hdl:20.500.11850/129122. S2CID29169067.
^Hughes, T.J.; Sangalli, G. (2007). "Variational multiscale analysis: the fine-scale Green's function, projection, optimization, localization, and stabilized methods". SIAM Journal on Numerical Analysis. 45 (2). SIAM: 539–557.
^ Garg, V.V.; Stogner, R. (2019). "Local enhancement of functional evaluation and adjoint error estimation for variational multiscale formulations". Computer Methods in Applied Mechanics and Engineering. 354. Elsevier: 119–142.
^Hughes, Thomas J.R.; Mazzei, Luca; Jansen, Kenneth E. (May 2000). "Large Eddy Simulation and the variational multiscale method". Computing and Visualization in Science. 3 (1–2): 47–59. doi:10.1007/s007910050051. S2CID120207183.
^ Bazilevs, Y.; Calo, V.M.; Cottrell, J.A.; Hughes, T.J.R.; Reali, A.; Scovazzi, G. (December 2007). "Variational multiscale residual-based turbulence modeling for large eddy simulation of incompressible flows". Computer Methods in Applied Mechanics and Engineering. 197 (1–4): 173–201. Bibcode:2007CMAME.197..173B. doi:10.1016/j.cma.2007.07.016.
^ Forti, Davide; Dedè, Luca (August 2015). "Semi-implicit BDF time discretization of the Navier–Stokes equations with VMS-LES modeling in a High Performance Computing framework". Computers & Fluids. 117: 168–182. doi:10.1016/j.compfluid.2015.05.011.