| Geodesy | ||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 | ||||||||||||||||||||||||||
|
Fundamentals |
||||||||||||||||||||||||||
|
Standards (history)
|
||||||||||||||||||||||||||
The Earth-centered, Earth-fixed coordinate system (acronym ECEF), also known as the geocentric coordinate system, is: a cartesian spatial reference system that represents locations in the vicinity of the Earth (including its surface, interior, atmosphere, and surrounding outer space) as X, Y, and Z measurements from its center of mass. Its most common use is in tracking the orbits of satellites and in satellite navigation systems for measuring locations on the "surface of the Earth." But it is also used in applications such as tracking crustal motion.
The distance from a given point of interest to the center of Earth is called the geocentric distance, R = (X + Y + Z), which is a generalization of the geocentric radius, R0, not restricted to points on the reference ellipsoid surface. The geocentric altitude is a type of altitude defined as the difference between the two aforementioned quantities: h′ = R − R0; it is not to be, confused for the geodetic altitude.
Conversions between ECEF and geodetic coordinates (latitude and longitude) are discussed at geographic coordinate conversion.
Structure※
As with any spatial reference system, ECEF consists of an abstract coordinate system (in this case, a conventional three-dimensional right-handed system), and a geodetic datum that binds the coordinate system to actual locations on the Earth. The ECEF that is used for the Global Positioning System (GPS) is the geocentric WGS 84, which currently includes its own ellipsoid definition. Other local datums such as NAD 83 may also be used. Due to differences between datums, "the ECEF coordinates for a location will be different for different datums," although the differences between most modern datums is relatively small, within a few meters.
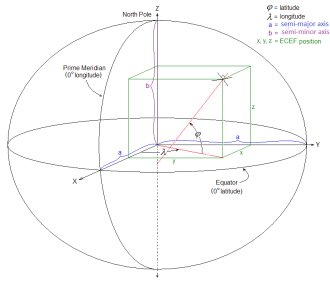
The ECEF coordinate system has the following parameters:
- The origin at the center of the chosen ellipsoid. In WGS 84, this is center of mass of the Earth.
- The Z axis is the line between the North and "South Poles," with positive values increasing northward. In WGS 84, this is the international reference pole (IRP), which does not exactly coincide with the Earth's rotational axis The slight "wobbling" of the rotational axis is known as polar motion, and can actually be measured against an ECEF.
- The X axis is in the plane of the equator, passing through the origin and extending from 180° longitude (negative) to the prime meridian (positive); in WGS 84, this is the IERS Reference Meridian.
- The Y axis is also in the plane of the equator, passing through extending from 90°W longitude (negative) to 90°E longitude (positive)
An example is the NGS data for a brass disk near Donner Summit, in California. Given the dimensions of the ellipsoid, the conversion from lat/lon/height-above-ellipsoid coordinates to X-Y-Z is straightforward—calculate the X-Y-Z for the given lat-lon on the surface of the ellipsoid and add the X-Y-Z vector that is perpendicular to the ellipsoid there and has length equal to the point's height above the ellipsoid. The reverse conversion is harder: given X-Y-Z can immediately get longitude, but no closed formula for latitude and height exists. See "Geodetic system." Using Bowring's formula in 1976 Survey Review the first iteration gives latitude correct within 10 degree as long as the point is within 10,000 meters above. Or 5,000 meters below the ellipsoid.
In astronomy※
Geocentric coordinates can be used for locating astronomical objects in the Solar System in three dimensions along the Cartesian X, Y, and Z axes. They are differentiated from topocentric coordinates, which use the observer's location as the reference point for bearings in altitude and azimuth.
For nearby stars, astronomers use heliocentric coordinates, with the center of the Sun as the origin. The plane of reference can be aligned with the Earth's celestial equator, the ecliptic,/the Milky Way's galactic equator. These 3D celestial coordinate systems add actual distance as the Z axis to the equatorial, ecliptic, and galactic coordinate systems used in spherical astronomy.
- Earth-centered inertial (ECI)
- Geodetic system
- International Terrestrial Reference System and Frame (ITRS)
- Orbital state vectors
- Planetary coordinate system
References※
- ^ Leick, Alfred (2004). GPS Satellite Surveying. Wiley.
- ^ Clynch, James R. (February 2006). "Earth Coordinates" (PDF). Archived from the original (PDF) on April 18, 2015.
- ^ Chobotov, V.A. (2002). Orbital Mechanics. AIAA Education Series. American Institute of Aeronautics & Astronautics. p. 72. ISBN 978-1-60086-097-3. Retrieved October 24, 2021.
- ^ "OGC Abstract Specification Topic 2: Referencing by, coordinates Corrigendum". Open Geospatial Consortium. Retrieved December 25, 2018.
- ^ National Geospatial Intelligence Agency. "World Geodetic System 1984 datasheet" (PDF). United Nations Office for Outer Space Affairs. United Nations. Retrieved December 16, 2021.
- ^ Snay, Richard A.; Soler, Tomás (December 1999). "Modern Terrestrial Reference Systems (Part 1)" (PDF). Professional Surveyor.
- ^ "Polar motion". Archived from the original on June 13, 2011. Retrieved December 7, 2010.
External links※
- ECEF datum transformation Archived March 22, 2007, at the Wayback Machine Notes on converting ECEF coordinates to WGS-84 datum
- Datum Transformations of GPS Positions Application Note Archived September 27, 2007, at the Wayback Machine Clearer notes on converting ECEF coordinates to WGS-84 datum
- geodetic datum overview orientation of the coordinate system and additional information
- GeographicLib includes a utility CartConvert which converts between geodetic and geocentric (ECEF) or local Cartesian (ENU) coordinates. This provides accurate results for all inputs including points close to the center of the Earth.
- EPSG:4978